1er septembre 2021 - Anton Vos
La trompe de l’éléphant inspire les robots de demain
Une étude est parvenue à décortiquer le comportement de l’appendice nasal du pachyderme en une vingtaine de mouvements de base. Une avancée majeure vers le développement d’un bras robotique souple.

Éléphant d'Afrique. Image: M. Milinkovitch
La souplesse, la flexibilité et la polyvalence de la trompe de l’éléphant représentent sans doute une sorte de graal pour les concepteurs de robots. Pas un os dans l’appendice nasal du pachyderme. Que du muscle et du tendon enveloppés dans une peau épaisse dont la courbure, la torsion et la déformation permettent aussi bien de saisir délicatement une fleur que de soulever une masse de 270 kilogrammes. Dans un article paru le 23 août dans la revue Current Biology, l’équipe de Michel Milinkovitch, professeur au Département de génétique et évolution (Faculté des sciences), a réussi, grâce à des technologies de capture de mouvements, à décortiquer les trajectoires complexes de la trompe de l’éléphant et à montrer qu’elles découlent de la combinaison d’une vingtaine de mouvements de base tels que la propagation d’une courbure, la succion ou encore la formation de pseudo-articulations. Cette avancée pourrait servir au développement d’un bras robotique souple aux usages multiples (industrie, sauvetage, aide aux personnes âgées…).
La trompe de l’éléphant est flexible sur toute sa longueur. La contraction coordonnée des six groupes de muscles qui la traversent et l’animent se traduit par des torsions, des flexions, des allongements, des raccourcissements et des raideurs. En théorie, ce membre, dont la cinématique repose sur l’incompressibilité des tissus autoportants qui le composent, possède un nombre infini de degrés de liberté. L’évolution des éléphants a toutefois permis le développement de stratégies réduisant la complexité biomécanique de leur trompe.
Deux éléphants expérimentés
Pour les découvrir, l’équipe de scientifiques s’est rendue en Afrique du Sud en mars 2020 afin d’y mener des expériences sur deux éléphants d’une vingtaine d’années appartenant au centre de conservation de la faune «Adventures with Elephants» dans la province de Limpopo.

Michel Milinkovitch, professeur à la Faculté des sciences, et l'un des éléphants de l'expérience. Photo: Sean Hensman/UNIGE
Les biologistes ont placé des marqueurs réfléchissants le long de la trompe des deux animaux avant d’enregistrer avec une grande précision leurs trajectoires en 3D à l’aide d’une dizaine de caméras infrarouges placées autour de la scène. Empruntée à l’industrie cinématographique, cette technologie a notamment donné vie aux personnages de Gollum dans Le Seigneur des Anneaux ou des Na’vis dans Avatar en transposant sur des personnages numériques les mouvements d’acteurs réels. Les deux pachydermes avaient pour mission de prendre et de déplacer une multitude d’objets de forme, taille et poids variables.
L’analyse des données a permis de montrer que les éléphants combinent une vingtaine de mouvements de base simples pour produire tous les comportements complexes dont ils sont capables avec leur trompe. Les éléments qui sont sélectionnés et combinés dépendent de la tâche que l’éléphant accomplit.
«Lorsqu’elle saisit et maintient un objet pour le transporter, la trompe présente une flexion localisée qui voyage ensuite de son extrémité vers sa base, explique Paule Dagenais, chercheuse au Département de génétique et évolution (Faculté des sciences). Mais quand l’éléphant atteint une cible placée devant lui, il allonge et rétracte des parties spécifiques de sa trompe de manière modulaire. Par ailleurs, un même mouvement peut remplir différentes fonctions, selon les cas de figure. Lorsqu’il saisit un disque en bois léger, l’animal utilise la succion comme force de levage. En revanche, cette technique n’est utilisée que pour sécuriser la position d’un disque plus lourd, la trompe renforçant la préhension en s’enroulant autour.»
L’éléphant a même développé une stratégie de préhension très particulière lorsqu’il désire atteindre une cible placée sur le côté. Sa trompe forme alors des segments rigides connectés par des articulations virtuelles donnant momentanément l’impression d’un coude et d’un poignet.
«Nous avons également découvert que le ralentissement de la trompe lorsqu’elle suit une courbe peut être prédit précisément sur la base de la courbure locale de cette trajectoire, poursuit Michel Milinkovitch. Ce qui est remarquable, c’est que cette relation mathématique qui lie la vitesse à la courbure de la trajectoire de la trompe existe également pour la main humaine lorsqu’elle dessine.»
Pour parachever le travail, les chercheurs et les chercheuses ont réalisé des images d’une précision inédite de l’intérieur de trompes d’éléphants d’Asie et d’Afrique à l’aide de la tomographie par ordinateur, de l’imagerie par résonance magnétique (IRM) et de coupes en série. Ces informations anatomiques combinées aux résultats comportementaux et cinématiques ont permis aux scientifiques d’établir un lien étroit entre le système musculaire de la trompe et ses fonctions biomécaniques.
Robots souples
Cette étude est notamment soutenue par le projet européen Proboscis dont l’objectif est précisément le développement de «robots souples» inspirés par le mécanisme de la trompe d’éléphant.
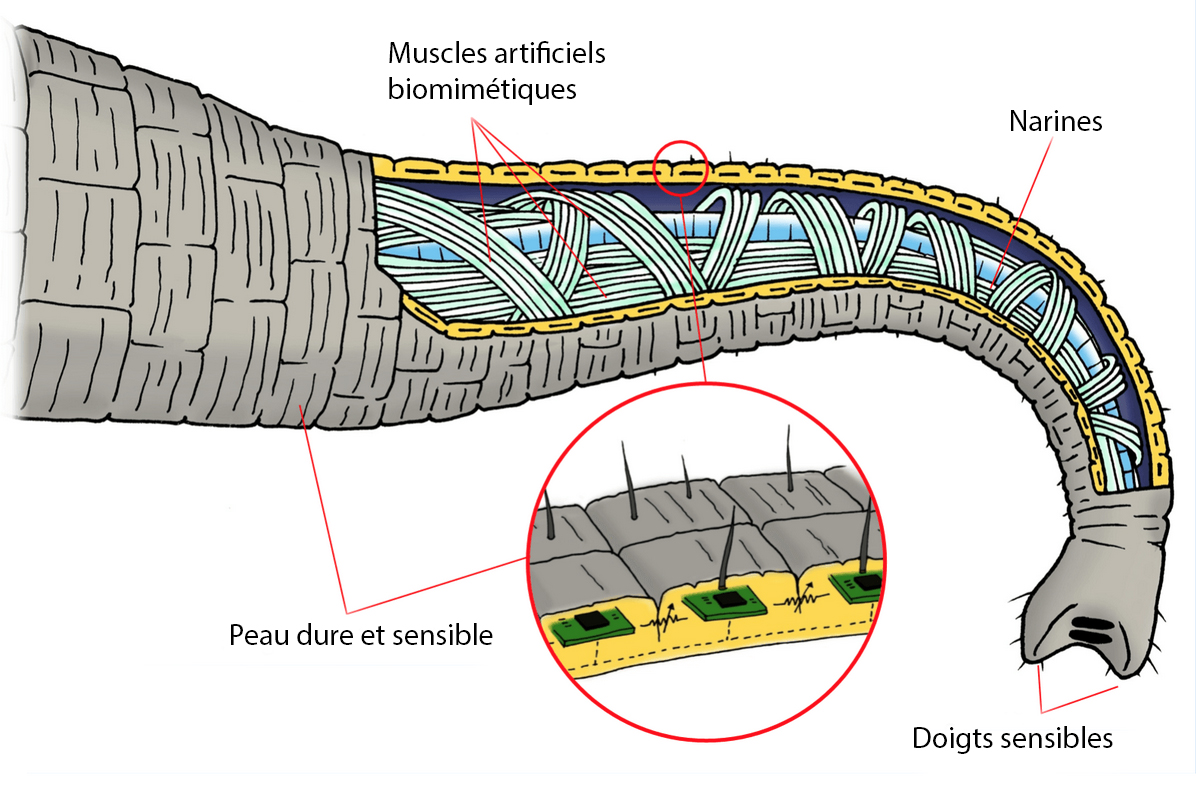
Schéma du concept de robot souple inspiré par la trompe d'éléphant
«Les robots classiques sont extrêmement bons pour effectuer une tâche spécifique pour laquelle ils ont été conçus, note Michel Milinkovitch qui représente l’Université de Genève dans le consortium Proboscis. Mais si vous voulez que ce robot fasse quelque chose d’un peu différent, il échouera lamentablement. Certains organismes vivants, eux, ont été optimisés pour la polyvalence. Le contrôle de la partie de la trompe qui se contracte est très fin. Ce n’est pas l’ensemble de la trompe qui s’allonge et se raccourcit – ce sont des portions, en fonction de ce que fait l’éléphant. Cela pourrait représenter un nouveau paradigme en robotique: à la place de segments métalliques reliés par des articulations, on pourrait utiliser des matériaux flexibles.»
Copier l’anatomie naturelle de l’appendice nasal des éléphants est probablement impossible mais il est envisageable de s’en inspirer pour tenter de recréer sa polyvalence dans les mouvements. Lucia Beccai, chercheuse à l’Instituto italiano di tecnologia et coordinatrice de Proboscis, affirme même sur CNN qu’un prototype fonctionnel devrait voir le jour d’ici environ un an.
«Les résultats de l’étude sont exceptionnels, mais il s’agit maintenant de traduire ces données biologiques en spécifications techniques qui ne doivent pas nécessairement copier l’organe naturel, souligne-t-elle. Nous devons extraire certains principes simplificateurs qui peuvent rendre le comportement suffisamment simple pour être efficace, adaptable aux changements et efficient.»
Si cela fonctionne, ce robot souple vraisemblablement composé de matériaux et de technologies nouveaux pourrait à la fois gérer des charges lourdes et légères, ce qui, d’un point de vue industriel, représente un énorme avantage. Un tel appareil pourrait servir sur des chaînes de production d’usines, être utilisé pour des opérations de recherche et de sauvetage et même dans le domaine de la santé pour soulever et aider les personnes âgées ou malades.
-
Publié le
Comment nos organes savent-ils quand arrêter de grandir?

-
Publié le
Les échanges d'énergie renouvelable entre pairs a un impact positif pour l'individu, la communauté et le réseau

-
Publié le
La théorie quantique a besoin de nombres complexes

-
Publié le
L’absence d’un interrupteur génétique à l’origine de malformations
